

Lideres en Automatizacion Industrial
Las Tres Aristas de Nuestro Mercado



Las Tres Aristas de Nuestro Mercado
AIT es una Empresa de automatización que se destaca por analizar y proveer soluciones en automatización de acuerdo a las medidas de sus exigencias. Buscamos brindarle una solución integral para su desarrollo y por eso planteamos una metodología de trabajo que nos permite planificar nuestros trabajos y realizarlos en tiempo y forma.
Planificacion
En la automatización industrial es imprescindible entender las necesidades de cada proyecto para poder brindar soluciones eficaces, para lograrlo es necesario analizar soluciones integrales que provean una mejora sustentable en la producción de su Empresa.
Implementación
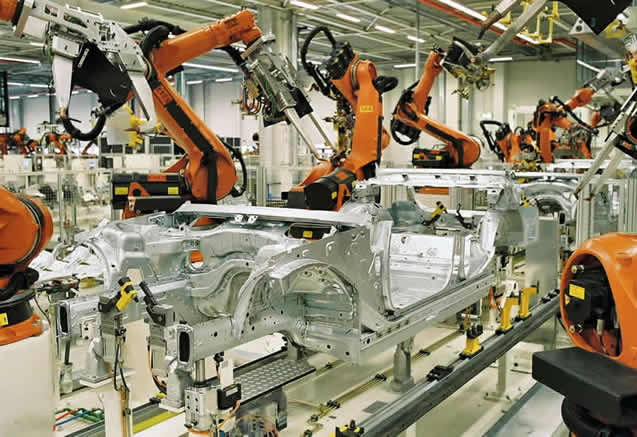
Se proveerán los servicios necesarios de acuerdo a su campo de producción, ya sea esté orientado a Automatización industrial de envases de Aluminio, Automatización industrial Automotriz o Automatización Industrial en otro sector productivo.
Ejecución
Cada Automatización que realizamos va acompañada de otros servicios segun las necesidades del proyecto, ya sea con Ingeniería de Control, Asistencia en Sistemas de PLC, Montajes Industriales, Termografia Infraroja, o algun otro.
LLave en Mano
AIT entrega el sistema implementado funcionando en óptimas condiciones, dando de esta forma finalizado el proyecto, considerando también la posibilidad de brindarle Mantenimiento Industrial periódico y/o un servicio de Gestion de Mantenimiento Industrial.
Porque los Números también importan, reflejan el compromiso de AIT con cada industria que deja en nuestras manos la implementación de automatización en su producción.
Días
de servicios
Clientes
Alrededor del Mundo
Nuevos
Proyectos
Horas
de vuelos
Grandes Empresas que han depositado su confianza en nuestras soluciónes en automatización












Si tienes alguna duda sobre los Productos o Servicios de AIT Contactanos!


{kind=link}
{kind=link}
{kind=link}